Le joystick :
Le matériel :
Pour la télécommande il nous faudra donc :
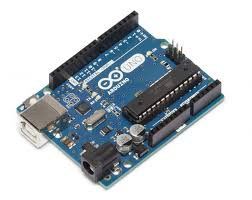
- Un Arduino Uno :
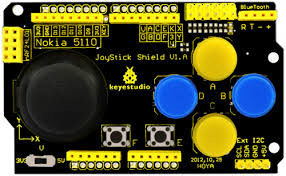
- Un joystick shield pour Arduino :
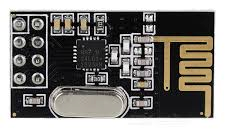
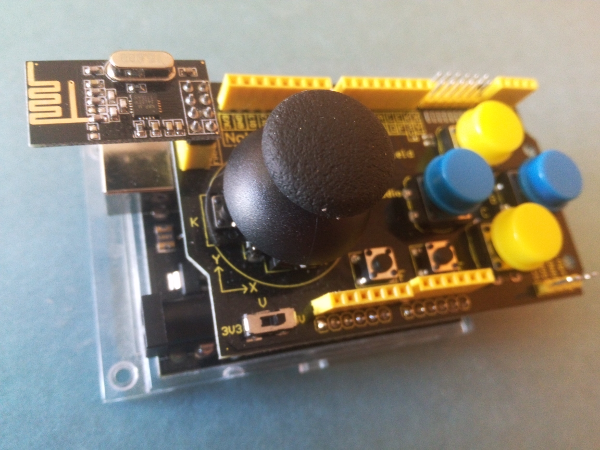
- Un module nRF24L01 :
 OU
OU 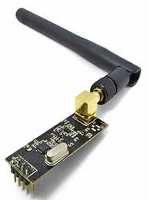
On peut le remplacer par un Pad analogique et des boutons faudra juste les câbler
Les branchements :
Pour les branchements, rien de plus simple, on plug le module nRF24L01 sur le joystick shield :
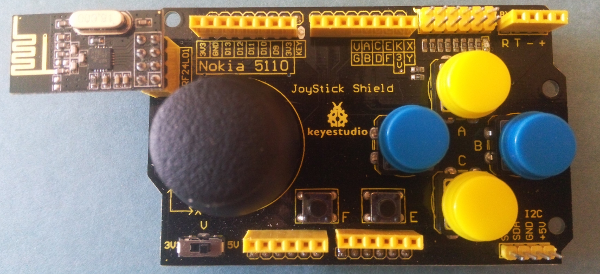
Le joystick shield utilise les ports suivant sur l'Arduino :
A0 et A1 pour l'orientation du pad
8 pour la pression du pad
2, 3, 4, 5, 6, 7 pour les boutons A, B, C, D, E, F
Le module nRF24L01 utilise les ports suivant sur l'Arduino :
9, 10 pour la radio
11, 12, 13 pour le SPI (mosi miso sclk)
Le module nRF24L01 est alimenté en 3.3v
Voici les fonctions de la télécommande :
PAD X : droite - tout droit - gauche
PAD Y : avant vitesse 1 - avant vitesse 2 - stop - arrière vitesse 1 - arrière vitesse 2
BOUTON A : Allume ou éteint les gyrophares.
BOUTON B : Allume ou éteint les phares.
BOUTON C : Allume le deuton et les gyrophares ou éteint le deuton. ( on appuiera sur A pour éteinte les gyrophares )
BOUTON D, E, F : Non utilisé.
Le programme :
On utilise la librairie RF24
Il faut la télécharger puis la dézipper et copier le dossier dans votre dossier librairie du dossier Arduino.
Voici le programme de la télécommande :
Joystick.ino
Vous pouvez adapter le seuil X et Y en fonction de votre PAD, il suffit de dé-commenter les lignes mentionné "pour debug",
vous pourrez ainsi voir les valeurs X et Y du PAD au repos dans le port série, et modifiez vos seuils (partie définition des constantes).
Copier ce programme dans l'IDE de l' Arduino, puis téléversez-le.
Une fois les réglages effectués, on peut passer au véhicule, Bateau ou voiture.
Le véhicule
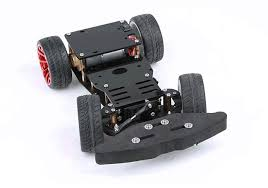
Il existe des châssis de voiture déjà équipé de ces moteurs et un servo-moteur pour la direction :
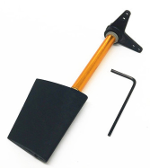
Pour un bateau il y a des kits moteur arbre hélice et gouvernail :

Le programme du véhicule ci-dessous est prévu pour un bateau de Police, avec un moteur, un gouvernail, des phares avant/arrière, un gyrophare et un deuton.
Le matériel :
Il nous faudra donc :
- Un Arduino Uno :
- Un module nRF24L01 :
OU
- Un moteurs :
- Un L293D (pont en H) :
- Un servo moteur :

- Un buzzer :

- Un condensateur 100uf :
- Trois LED rouge, deux blanches et une bleu :
- Et des câbles mâle/mâle, mâle/femelle et femelle/femelle:
- Et une petite platine d'essais:
Les branchements :
Voici le montage, suivi des explications :
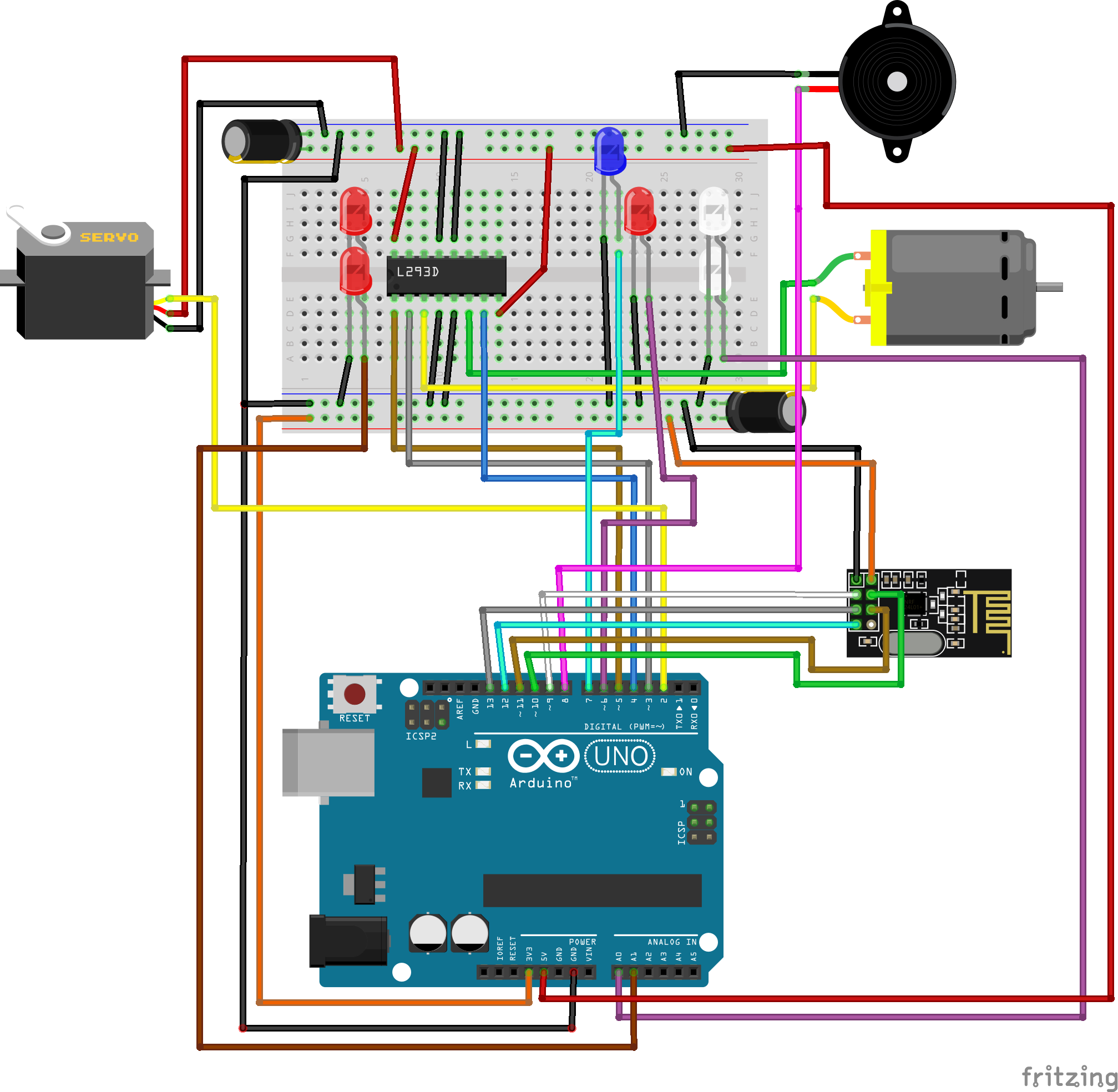
Le module nRF24L01 :
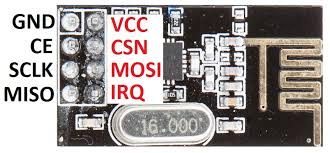
Le GND du nRF24L01 : au GND de l'Arduino
Le VCC du nRF24L01 : au 3.3V de l'Arduino
Le CE du nRF24L01 : au PIN 9 de l'Arduino
Le CSN du nRF24L01 : au PIN 10 de l'Arduino
Le SLK du nRF24L01 : au PIN 13 de l'Arduino
Le MOSI du nRF24L01 : au PIN 11 de l'Arduino
Le MISO du nRF24L01 : au PIN 12 de l'Arduino
Le IRQ du nRF24L01 : Non utilisé
Attention, le module est alimenté en 3.3V.
Il faut ajouter un condensateur 100 uF entre le GND ET 3.3V de l'Arduino pour que le module fonctionne correctement en récepteur
Le servo-moteur :
Le GND du servo-moteur : au GND de l'Arduino
Le VCC du servo-moteur : au 5V de l'Arduino
La commande du servo-moteur : au PIN 2 de l'Arduino
Le moteur et le L293D :

On a un seul moteur à brancher :
les quatres GND du L293D : au GND de l'Arduino
OUTPUT 1 du L293D : au moteur
OUTPUT 2 du L293D : au moteur
le input 1 du L293D : au PIN 3 de l'Arduino
le input 2 du L293D : au PIN 4 de l'Arduino
le enable 1 du L293D : au PIN 5 de l'Arduino
le Vss du L293D : au 5V de l'Arduino (alim du L293D)
le Vs du L293D : au 5V de l'Arduino (alim pour les moteurs)
J'ai ajouté un condensateur 100uF entre le GND et 5V, j' utilise l'arduino pour alimenter mon moteur, cela suffit pour les tests.
Mais il est conseillé d'utiliser une alim externe pour les moteurs, le + sur Vs et le GND au GND de l'Arduino.
Le buzzer :
le GND du buzzer : au GND de l'Arduino
le + du buzzer : au PIN 8 de l'Arduino
Le gyrophare :
Une LED rouge : au GND et PIN 6 de l'Arduino
Une LED bleu : au GND et PIN 7 de l'Arduino
Les phares :
Deux LED rouge : au GND et PIN A0 de l'Arduino (arrière)
Deux LED blanches : au GND et PIN A1 de l'Arduino (avant)
Le programme :
Voici le programme du bateau :
Bateau.ino
Voilà, ce programme ne comporte aucun "delay", on utilise "millis" afin de n'avoir aucune instructions bloquantes
Ainsi on peut piloter en même temps que le deuton sonne et les gyrophares activés
J'ai reçu le châssis de voiture que j'avais commandé, je l'ai monté :
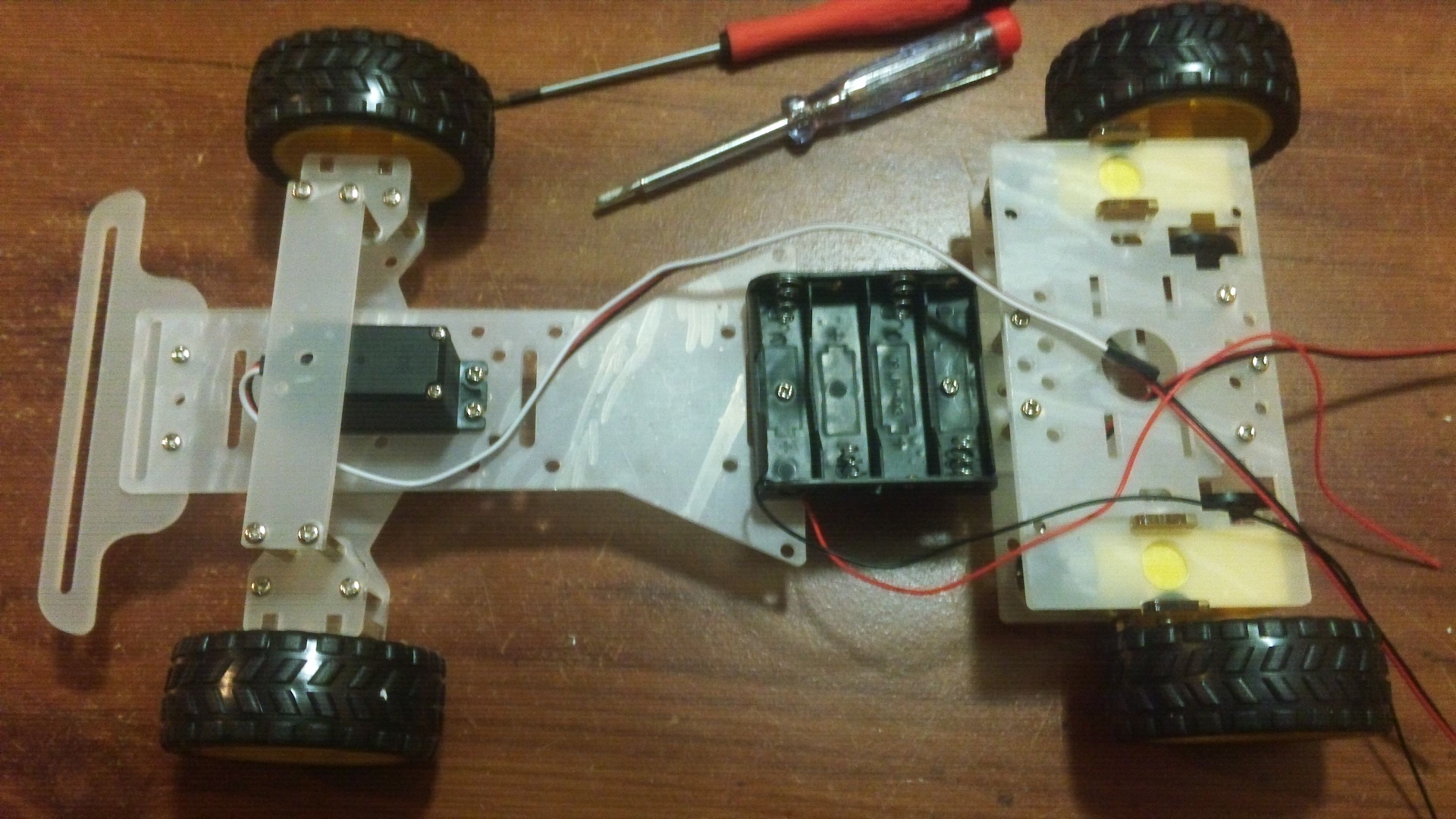
Voici le programme pour la voiture, c'est le même, il y a deux moteurs au lieu d'un, les GPIO utilisés sont différents, c'est tout
voiture.ino
Je suis en train de faire une carrosserie pour intégrer les éléments, en polystyrène pour le moment, et je refais le programme pour un Arduino Nano, ça prend moins de place.
J'ajouterai une petite vidéo quand j'aurai fini.